I motori stepper o motori passo passo vengono gestiti tramite forme d’onde impulsive, ad ogni impulso (passo/step) il motore ruota di un preciso angolo.
Uno parametro importante è la risoluzione. Come si calcola, come si esprime questo parametro?
Il motore ad ogni step/passo va a formare un angolo costruito tra raggio che formava prima e dopo lo spostamento, per ipotesi facciamo finta sia di 18° … sappiamo anche che un giro completo del motore non è altro che un angolo giro di 360° quindi possiamo esprimere la risoluzione in questo modo:
risoluzione = 360 / step
nel nostro caso: 360 / 18 = 20 ne consegue che per fare un giro completo dobbiamo compiere 20 steps.
Come sono fatti i motori stepper?
I motori stepper a magnete permanente sullo statore presentano le fasi (bobine/avvolgimenti) che variano di numero in base al motore, ed il rotore che è costituito da magneti permanenti. Ne esistono anche di altri tipi, sviluppati con tecnologie diverse.

Come funzionano i motori stepper? Come fanno a girare?
Sappiamo grazie all’elettromagnetismo che facendo passare una corrente elettrica in un avvolgimento a spirale elicoidale fatto di filo conduttore, si viene a generare un campo elettromagnetico con un preciso verso, ottenendo così un solenoide, di fatto una calamita a tutti gli effetti o meglio ancora una elettrocalamita.
Sappiamo che in un magnete permanente possiamo distinguere un SUD ed un NORD MAGNETICO FISSO, mentre invece con una elettrocalamita abbiamo un NORD ed un SUD MAGNETICO variabile! Ma possiamo riconoscerli facilmente perché il NORD MAGNETICO è indicato dal verso del vettore del campo elettromagnetico indotto dal verso della corrente che attraversa l’avvolgimento in quell’istante.
Ed è grazie a questo fenomeno fisico che riusciamo a far girare il rotore che ricordiamo è realizzato appunto con magneti permanenti.
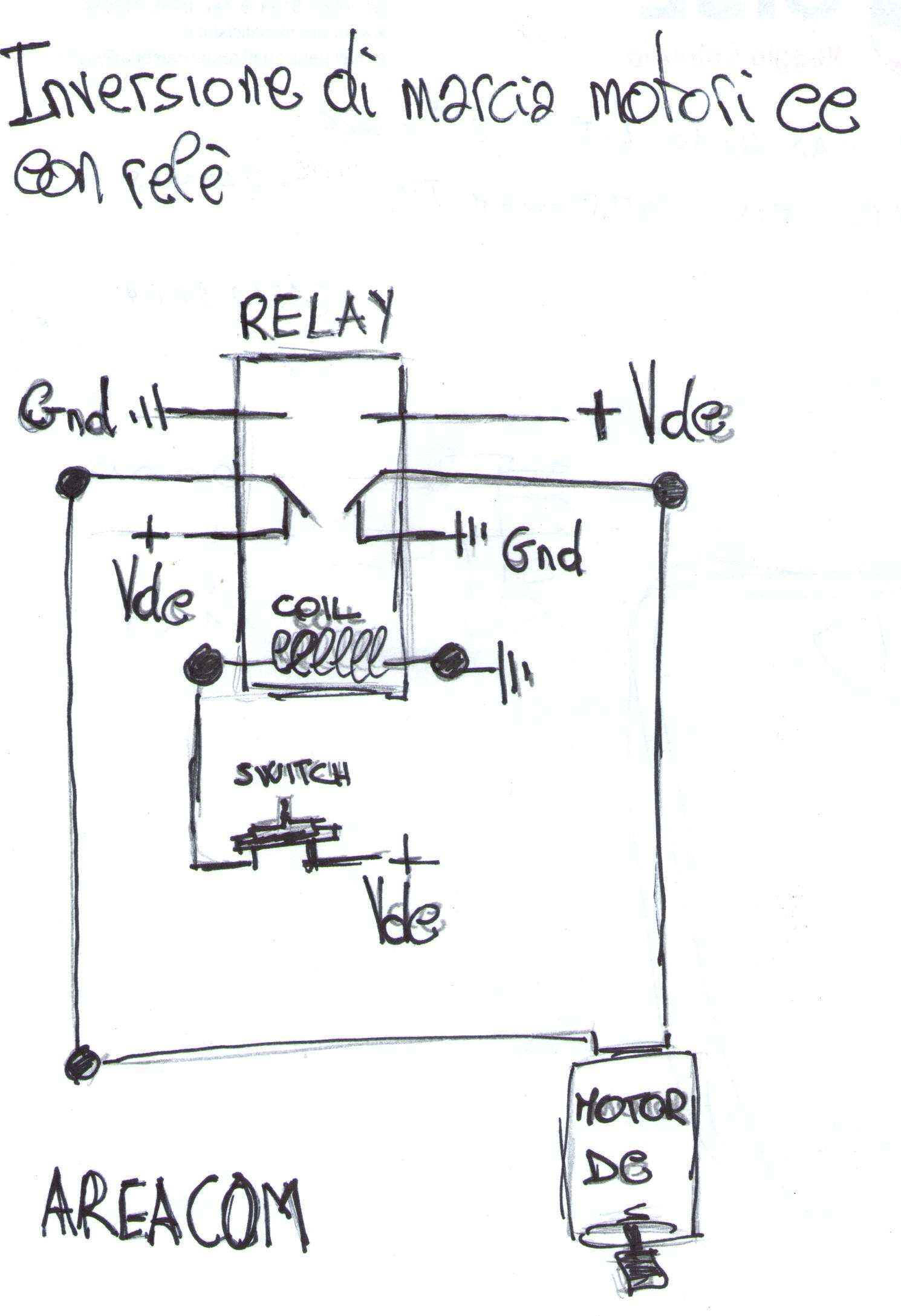
Tanti componenti sfruttano questo principio, come i relè ad esempio, le serrature elettriche ecc…
I motori stepper possono essere Unipolari e Bipolari come si riconoscono? Quali sono le differenze?
Possiamo fare una distinzione per il numero di fili che fuoriescono dal motore tanto per iniziare.
I motori unipolari possono essere a 5 o 6 fili e quelli bipolari a 4 fili, poi si possono trovare quelli a 8 fili e possono essere usati in configurazione sia Unipolare che Bipolare.
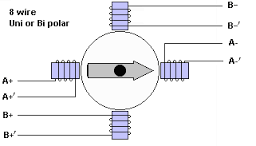
… altra differenza sta nel modo in cui vengono pilotati.
Per i motori bipolari infatti c’è la necessità di dover invertire la polarità sulle fasi (ecco perché Bipolari) per poter compiere un giro non avendo un punto comune come gli unipolari.
Guardando le immagini questo si evince chiaramente la mancanza del punto in comune.
Volendo procedere senza invertire le polarità nella configurazione bipolare non c’è modo di poter andare avanti con la rotazione, otterremmo solo delle vibrazioni perché il motore andrebbe avanti/indietro!
Capire il perché si debbano invertire le polarità non è complesso, ne abbiamo già parlato in alto all’articolo.
Tutto sta nella variazione poli magnetici della fase.
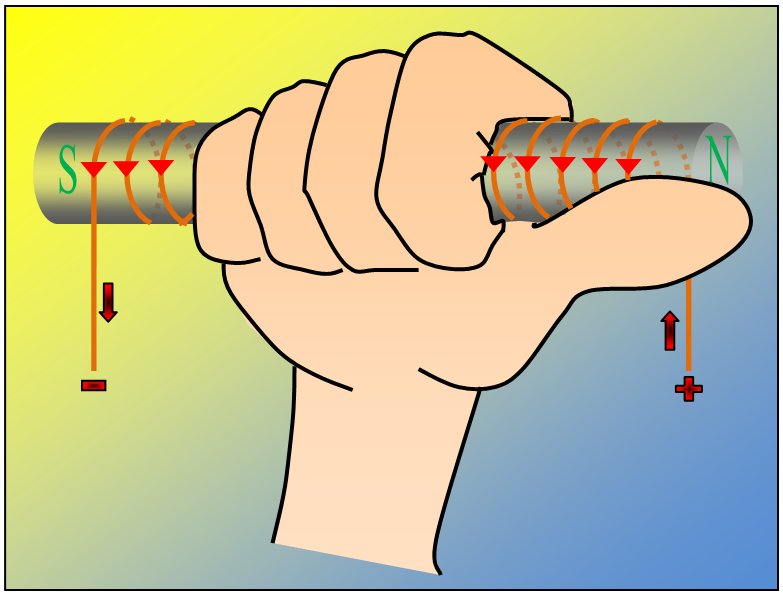
Esiste una regola, chiamata regola della mano destra, che ci aiuta ad individuare il NORD ed il SUD in un solenoide…
Se noi chiudiamo nel pugno della mano destra l’avvolgimento e nel farlo seguiamo con le dita della mano il verso della corrente che percorre il filo distendendo il pollice, otteniamo il verso del vettore del campo elettromagnetico generato dalla corrente ed il verso del vettore indicato dal pollice ci informa così che su quel lato dell’avvolgimento si è formato il NORD MAGNETICO…. ovviamente per forza di cose il SUD si troverà dal lato opposto indicato dal pollice! Figo vero! 😀

Ecco che adesso riusciamo a capire perché bisogna cambiare il verso della corrente per far andare avanti il motore!
Bisogna alternare i poli magnetici della fase per attrarre il rotore e quindi permettergli di compiere il suo giro.

Come riconoscere le fasi di un motore stepper unipolare e bipolare?
Multimetro alla mano ruotiamo la manopola sulla scala degli Ohm posizionandola su fondo scala 200 Ohm …
Riconoscere le fasi in un motore bipolare:
Individuare le fasi in un motore bipolare è semplicissimo, posizioniamo un puntale del multimetro su uno qualsiasi dei 4 fili che fuoriescono dal motore e con l’altro puntale del multimetro andiamo a cercare quali degli altri 3 fili ci dia una lettura sul display del multimetro, appena individuato abbiamo quindi “trovato” la prima fase del motore.. gli altri due fili rimanenti corrispondono all’altra fase, possiamo evincerlo dalle immagine viste in precedenza.
Riconoscere le fasi in un motore unipolare:
Identificare le fasi in un motore stepper unipolare è un attimino diverso, ma non complicato.
Dobbiamo individuare prima il comune e poi sempre empiricamente andiamo ad identificare l’ordine di alimentazione delle fasi per ottenere una rotazione corretta in senso orario ed in senso antiorario.
Questo penso sia uno di quei casi in cui una video dimostrazione si rivela meglio di 1000 parole ma non avendo un motore stepper unipolare per farvi un video allora ho cercato in rete e ne ho trovato uno che vi posto qui di seguito, nel video viene utilizzato uno stepper unipolare a 5 fili:
Ciao e alla prossima 🙂