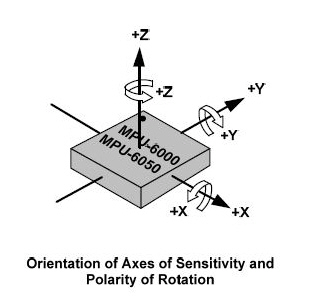
MPU6050 su GY-521, un altro nuovo componente si aggiunge alla nostra lista, si tratta di una IMU .
Sensore MEMS (Micro Electro-Mechanical Systems), comprende uno giroscopio e un accelerometro entrambi a 3 assi (x,y,z).
Cosa possiamo fare con uno giroscopio ed un accelerometro?
Possiamo misurare l’accelerazione angolare tramite lo (giroscopio) e l’accelerazione tramite l’accelerometro lungo una direzione, di un corpo su di un proprio asse (x,y,z).
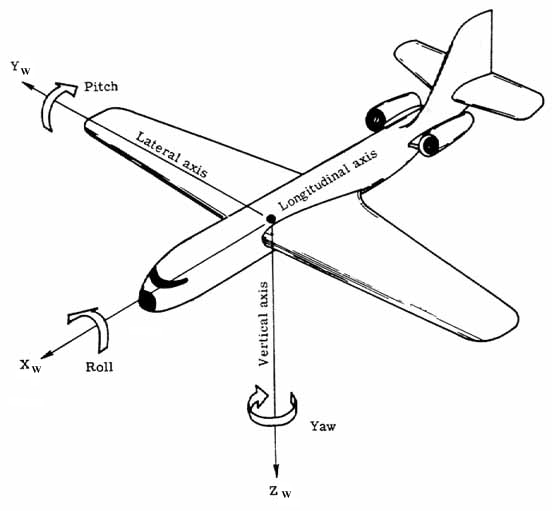
Se ad esempio andassimo ad installare questo componente su di un quadricottero potremmo gestire ad esempio i classici ROLL, YAW, PITCH rappresentati nell’immagine seguente:
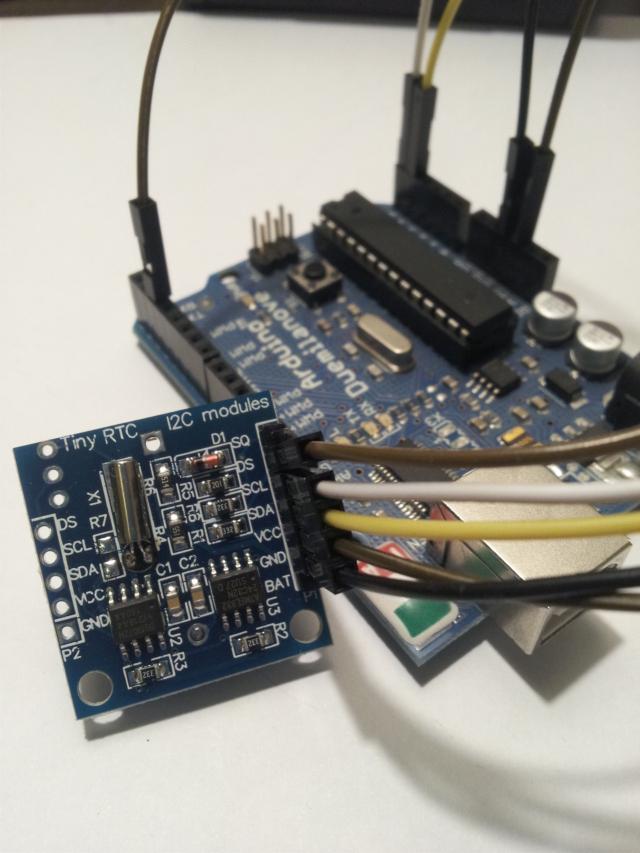
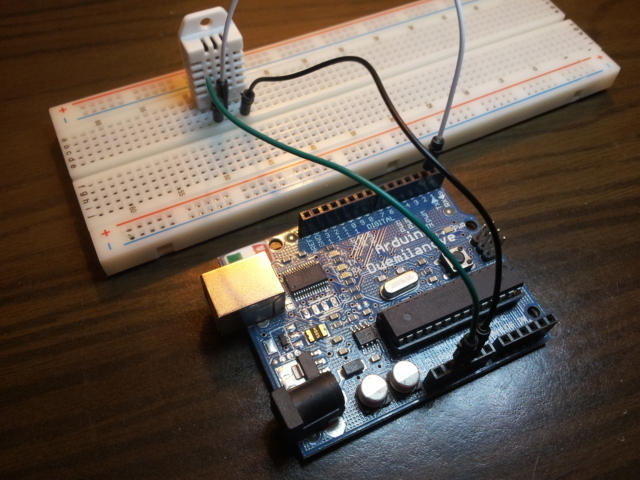
I collegamenti da effettuare tra la GY-521 e Arduino sono i seguenti:
GY-521 → Arduino
Vcc → 5Vcc
Gnd → Gnd
SCL → A5
SDA → A4
INT → 2
Qui un video dimostrativo:
sketch Arduino:
#include <Wire.h>
#include <avr/interrupt.h>
#include <avr/pgmspace.h>
#define MPU_ADDR 0x68
#define MEM_START_ADDR 0x6E
#define MEM_R_W 0x6F
long lastRead = 0;
byte processed_packet[8];
byte received_packet[50];
byte temp = 0;
byte fifoCountL = 0;
byte fifoCountL2 = 0;
byte packetCount = 0x00;
boolean longPacket = false;
boolean firstPacket = true;
float q[4];
//This 3D array contains the default DMP memory bank binary that gets loaded during initialization.
//In the Invensense UC3-A3 firmware this is uploaded in 128 byte tranmissions, but the Arduino Wire
//library only supports 32 byte transmissions, including the register address to which you're writing,
//so I broke it up into 16 byte transmission payloads which are sent in the dmp_init() function below.
//
//This was reconstructed from observed I2C traffic generated by the UC3-A3 demo code, and not extracted
//directly from that code. That is true of all transmissions in this sketch, and any documentation has
//been added after the fact by referencing the Invensense code.
unsigned const char dmpMem[8][16][16] PROGMEM = {
{
{0xFB, 0x00, 0x00, 0x3E, 0x00, 0x0B, 0x00, 0x36, 0x00, 0x01, 0x00, 0x02, 0x00, 0x03, 0x00, 0x00},
{0x00, 0x65, 0x00, 0x54, 0xFF, 0xEF, 0x00, 0x00, 0xFA, 0x80, 0x00, 0x0B, 0x12, 0x82, 0x00, 0x01},
{0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x28, 0x00, 0x00, 0xFF, 0xFF, 0x45, 0x81, 0xFF, 0xFF, 0xFA, 0x72, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x03, 0xE8, 0x00, 0x00, 0x00, 0x01, 0x00, 0x01, 0x7F, 0xFF, 0xFF, 0xFE, 0x80, 0x01},
{0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x3E, 0x03, 0x30, 0x40, 0x00, 0x00, 0x00, 0x02, 0xCA, 0xE3, 0x09, 0x3E, 0x80, 0x00, 0x00},
{0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x00},
{0x41, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x0B, 0x2A, 0x00, 0x00, 0x16, 0x55, 0x00, 0x00, 0x21, 0x82},
{0xFD, 0x87, 0x26, 0x50, 0xFD, 0x80, 0x00, 0x00, 0x00, 0x1F, 0x00, 0x00, 0x00, 0x05, 0x80, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x6F, 0x00, 0x02, 0x65, 0x32, 0x00, 0x00, 0x5E, 0xC0},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0xFB, 0x8C, 0x6F, 0x5D, 0xFD, 0x5D, 0x08, 0xD9, 0x00, 0x7C, 0x73, 0x3B, 0x00, 0x6C, 0x12, 0xCC},
{0x32, 0x00, 0x13, 0x9D, 0x32, 0x00, 0xD0, 0xD6, 0x32, 0x00, 0x08, 0x00, 0x40, 0x00, 0x01, 0xF4},
{0xFF, 0xE6, 0x80, 0x79, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0xD0, 0xD6, 0x00, 0x00, 0x27, 0x10}
},
{
{0xFB, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x01, 0x00, 0x00, 0x00},
{0x00, 0x00, 0xFA, 0x36, 0xFF, 0xBC, 0x30, 0x8E, 0x00, 0x05, 0xFB, 0xF0, 0xFF, 0xD9, 0x5B, 0xC8},
{0xFF, 0xD0, 0x9A, 0xBE, 0x00, 0x00, 0x10, 0xA9, 0xFF, 0xF4, 0x1E, 0xB2, 0x00, 0xCE, 0xBB, 0xF7},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x04, 0x00, 0x02, 0x00, 0x02, 0x02, 0x00, 0x00, 0x0C},
{0xFF, 0xC2, 0x80, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0xCF, 0x80, 0x00, 0x40, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x00, 0x00, 0x00, 0x14},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x03, 0x3F, 0x68, 0xB6, 0x79, 0x35, 0x28, 0xBC, 0xC6, 0x7E, 0xD1, 0x6C},
{0x80, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0xB2, 0x6A, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0xF0, 0x00, 0x00, 0x00, 0x30},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x25, 0x4D, 0x00, 0x2F, 0x70, 0x6D, 0x00, 0x00, 0x05, 0xAE, 0x00, 0x0C, 0x02, 0xD0}
},
{
{0x00, 0x00, 0x00, 0x00, 0x00, 0x65, 0x00, 0x54, 0xFF, 0xEF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x01, 0x00, 0x00, 0x44, 0x00, 0x00, 0x00, 0x00, 0x0C, 0x00, 0x00, 0x00, 0x01, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x65, 0x00, 0x00, 0x00, 0x54, 0x00, 0x00, 0xFF, 0xEF, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00},
{0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00}
},
{
{0xD8, 0xDC, 0xBA, 0xA2, 0xF1, 0xDE, 0xB2, 0xB8, 0xB4, 0xA8, 0x81, 0x91, 0xF7, 0x4A, 0x90, 0x7F},
{0x91, 0x6A, 0xF3, 0xF9, 0xDB, 0xA8, 0xF9, 0xB0, 0xBA, 0xA0, 0x80, 0xF2, 0xCE, 0x81, 0xF3, 0xC2},
{0xF1, 0xC1, 0xF2, 0xC3, 0xF3, 0xCC, 0xA2, 0xB2, 0x80, 0xF1, 0xC6, 0xD8, 0x80, 0xBA, 0xA7, 0xDF},
{0xDF, 0xDF, 0xF2, 0xA7, 0xC3, 0xCB, 0xC5, 0xB6, 0xF0, 0x87, 0xA2, 0x94, 0x24, 0x48, 0x70, 0x3C},
{0x95, 0x40, 0x68, 0x34, 0x58, 0x9B, 0x78, 0xA2, 0xF1, 0x83, 0x92, 0x2D, 0x55, 0x7D, 0xD8, 0xB1},
{0xB4, 0xB8, 0xA1, 0xD0, 0x91, 0x80, 0xF2, 0x70, 0xF3, 0x70, 0xF2, 0x7C, 0x80, 0xA8, 0xF1, 0x01},
{0xB0, 0x98, 0x87, 0xD9, 0x43, 0xD8, 0x86, 0xC9, 0x88, 0xBA, 0xA1, 0xF2, 0x0E, 0xB8, 0x97, 0x80},
{0xF1, 0xA9, 0xDF, 0xDF, 0xDF, 0xAA, 0xDF, 0xDF, 0xDF, 0xF2, 0xAA, 0xC5, 0xCD, 0xC7, 0xA9, 0x0C},
{0xC9, 0x2C, 0x97, 0x97, 0x97, 0x97, 0xF1, 0xA9, 0x89, 0x26, 0x46, 0x66, 0xB0, 0xB4, 0xBA, 0x80},
{0xAC, 0xDE, 0xF2, 0xCA, 0xF1, 0xB2, 0x8C, 0x02, 0xA9, 0xB6, 0x98, 0x00, 0x89, 0x0E, 0x16, 0x1E},
{0xB8, 0xA9, 0xB4, 0x99, 0x2C, 0x54, 0x7C, 0xB0, 0x8A, 0xA8, 0x96, 0x36, 0x56, 0x76, 0xF1, 0xB9},
{0xAF, 0xB4, 0xB0, 0x83, 0xC0, 0xB8, 0xA8, 0x97, 0x11, 0xB1, 0x8F, 0x98, 0xB9, 0xAF, 0xF0, 0x24},
{0x08, 0x44, 0x10, 0x64, 0x18, 0xF1, 0xA3, 0x29, 0x55, 0x7D, 0xAF, 0x83, 0xB5, 0x93, 0xAF, 0xF0},
{0x00, 0x28, 0x50, 0xF1, 0xA3, 0x86, 0x9F, 0x61, 0xA6, 0xDA, 0xDE, 0xDF, 0xD9, 0xFA, 0xA3, 0x86},
{0x96, 0xDB, 0x31, 0xA6, 0xD9, 0xF8, 0xDF, 0xBA, 0xA6, 0x8F, 0xC2, 0xC5, 0xC7, 0xB2, 0x8C, 0xC1},
{0xB8, 0xA2, 0xDF, 0xDF, 0xDF, 0xA3, 0xDF, 0xDF, 0xDF, 0xD8, 0xD8, 0xF1, 0xB8, 0xA8, 0xB2, 0x86}
},
{
{0xB4, 0x98, 0x0D, 0x35, 0x5D, 0xB8, 0xAA, 0x98, 0xB0, 0x87, 0x2D, 0x35, 0x3D, 0xB2, 0xB6, 0xBA},
{0xAF, 0x8C, 0x96, 0x19, 0x8F, 0x9F, 0xA7, 0x0E, 0x16, 0x1E, 0xB4, 0x9A, 0xB8, 0xAA, 0x87, 0x2C},
{0x54, 0x7C, 0xB9, 0xA3, 0xDE, 0xDF, 0xDF, 0xA3, 0xB1, 0x80, 0xF2, 0xC4, 0xCD, 0xC9, 0xF1, 0xB8},
{0xA9, 0xB4, 0x99, 0x83, 0x0D, 0x35, 0x5D, 0x89, 0xB9, 0xA3, 0x2D, 0x55, 0x7D, 0xB5, 0x93, 0xA3},
{0x0E, 0x16, 0x1E, 0xA9, 0x2C, 0x54, 0x7C, 0xB8, 0xB4, 0xB0, 0xF1, 0x97, 0x83, 0xA8, 0x11, 0x84},
{0xA5, 0x09, 0x98, 0xA3, 0x83, 0xF0, 0xDA, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0xD8, 0xF1, 0xA5},
{0x29, 0x55, 0x7D, 0xA5, 0x85, 0x95, 0x02, 0x1A, 0x2E, 0x3A, 0x56, 0x5A, 0x40, 0x48, 0xF9, 0xF3},
{0xA3, 0xD9, 0xF8, 0xF0, 0x98, 0x83, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0x97, 0x82, 0xA8, 0xF1},
{0x11, 0xF0, 0x98, 0xA2, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0xDA, 0xF3, 0xDE, 0xD8, 0x83, 0xA5},
{0x94, 0x01, 0xD9, 0xA3, 0x02, 0xF1, 0xA2, 0xC3, 0xC5, 0xC7, 0xD8, 0xF1, 0x84, 0x92, 0xA2, 0x4D},
{0xDA, 0x2A, 0xD8, 0x48, 0x69, 0xD9, 0x2A, 0xD8, 0x68, 0x55, 0xDA, 0x32, 0xD8, 0x50, 0x71, 0xD9},
{0x32, 0xD8, 0x70, 0x5D, 0xDA, 0x3A, 0xD8, 0x58, 0x79, 0xD9, 0x3A, 0xD8, 0x78, 0x93, 0xA3, 0x4D},
{0xDA, 0x2A, 0xD8, 0x48, 0x69, 0xD9, 0x2A, 0xD8, 0x68, 0x55, 0xDA, 0x32, 0xD8, 0x50, 0x71, 0xD9},
{0x32, 0xD8, 0x70, 0x5D, 0xDA, 0x3A, 0xD8, 0x58, 0x79, 0xD9, 0x3A, 0xD8, 0x78, 0xA8, 0x8A, 0x9A},
{0xF0, 0x28, 0x50, 0x78, 0x9E, 0xF3, 0x88, 0x18, 0xF1, 0x9F, 0x1D, 0x98, 0xA8, 0xD9, 0x08, 0xD8},
{0xC8, 0x9F, 0x12, 0x9E, 0xF3, 0x15, 0xA8, 0xDA, 0x12, 0x10, 0xD8, 0xF1, 0xAF, 0xC8, 0x97, 0x87}
},
{
{0x34, 0xB5, 0xB9, 0x94, 0xA4, 0x21, 0xF3, 0xD9, 0x22, 0xD8, 0xF2, 0x2D, 0xF3, 0xD9, 0x2A, 0xD8},
{0xF2, 0x35, 0xF3, 0xD9, 0x32, 0xD8, 0x81, 0xA4, 0x60, 0x60, 0x61, 0xD9, 0x61, 0xD8, 0x6C, 0x68},
{0x69, 0xD9, 0x69, 0xD8, 0x74, 0x70, 0x71, 0xD9, 0x71, 0xD8, 0xB1, 0xA3, 0x84, 0x19, 0x3D, 0x5D},
{0xA3, 0x83, 0x1A, 0x3E, 0x5E, 0x93, 0x10, 0x30, 0x81, 0x10, 0x11, 0xB8, 0xB0, 0xAF, 0x8F, 0x94},
{0xF2, 0xDA, 0x3E, 0xD8, 0xB4, 0x9A, 0xA8, 0x87, 0x29, 0xDA, 0xF8, 0xD8, 0x87, 0x9A, 0x35, 0xDA},
{0xF8, 0xD8, 0x87, 0x9A, 0x3D, 0xDA, 0xF8, 0xD8, 0xB1, 0xB9, 0xA4, 0x98, 0x85, 0x02, 0x2E, 0x56},
{0xA5, 0x81, 0x00, 0x0C, 0x14, 0xA3, 0x97, 0xB0, 0x8A, 0xF1, 0x2D, 0xD9, 0x28, 0xD8, 0x4D, 0xD9},
{0x48, 0xD8, 0x6D, 0xD9, 0x68, 0xD8, 0xB1, 0x84, 0x0D, 0xDA, 0x0E, 0xD8, 0xA3, 0x29, 0x83, 0xDA},
{0x2C, 0x0E, 0xD8, 0xA3, 0x84, 0x49, 0x83, 0xDA, 0x2C, 0x4C, 0x0E, 0xD8, 0xB8, 0xB0, 0xA8, 0x8A},
{0x9A, 0xF5, 0x20, 0xAA, 0xDA, 0xDF, 0xD8, 0xA8, 0x40, 0xAA, 0xD0, 0xDA, 0xDE, 0xD8, 0xA8, 0x60},
{0xAA, 0xDA, 0xD0, 0xDF, 0xD8, 0xF1, 0x97, 0x86, 0xA8, 0x31, 0x9B, 0x06, 0x99, 0x07, 0xAB, 0x97},
{0x28, 0x88, 0x9B, 0xF0, 0x0C, 0x20, 0x14, 0x40, 0xB8, 0xB0, 0xB4, 0xA8, 0x8C, 0x9C, 0xF0, 0x04},
{0x28, 0x51, 0x79, 0x1D, 0x30, 0x14, 0x38, 0xB2, 0x82, 0xAB, 0xD0, 0x98, 0x2C, 0x50, 0x50, 0x78},
{0x78, 0x9B, 0xF1, 0x1A, 0xB0, 0xF0, 0x8A, 0x9C, 0xA8, 0x29, 0x51, 0x79, 0x8B, 0x29, 0x51, 0x79},
{0x8A, 0x24, 0x70, 0x59, 0x8B, 0x20, 0x58, 0x71, 0x8A, 0x44, 0x69, 0x38, 0x8B, 0x39, 0x40, 0x68},
{0x8A, 0x64, 0x48, 0x31, 0x8B, 0x30, 0x49, 0x60, 0xA5, 0x88, 0x20, 0x09, 0x71, 0x58, 0x44, 0x68}
},
{
{0x11, 0x39, 0x64, 0x49, 0x30, 0x19, 0xF1, 0xAC, 0x00, 0x2C, 0x54, 0x7C, 0xF0, 0x8C, 0xA8, 0x04},
{0x28, 0x50, 0x78, 0xF1, 0x88, 0x97, 0x26, 0xA8, 0x59, 0x98, 0xAC, 0x8C, 0x02, 0x26, 0x46, 0x66},
{0xF0, 0x89, 0x9C, 0xA8, 0x29, 0x51, 0x79, 0x24, 0x70, 0x59, 0x44, 0x69, 0x38, 0x64, 0x48, 0x31},
{0xA9, 0x88, 0x09, 0x20, 0x59, 0x70, 0xAB, 0x11, 0x38, 0x40, 0x69, 0xA8, 0x19, 0x31, 0x48, 0x60},
{0x8C, 0xA8, 0x3C, 0x41, 0x5C, 0x20, 0x7C, 0x00, 0xF1, 0x87, 0x98, 0x19, 0x86, 0xA8, 0x6E, 0x76},
{0x7E, 0xA9, 0x99, 0x88, 0x2D, 0x55, 0x7D, 0x9E, 0xB9, 0xA3, 0x8A, 0x22, 0x8A, 0x6E, 0x8A, 0x56},
{0x8A, 0x5E, 0x9F, 0xB1, 0x83, 0x06, 0x26, 0x46, 0x66, 0x0E, 0x2E, 0x4E, 0x6E, 0x9D, 0xB8, 0xAD},
{0x00, 0x2C, 0x54, 0x7C, 0xF2, 0xB1, 0x8C, 0xB4, 0x99, 0xB9, 0xA3, 0x2D, 0x55, 0x7D, 0x81, 0x91},
{0xAC, 0x38, 0xAD, 0x3A, 0xB5, 0x83, 0x91, 0xAC, 0x2D, 0xD9, 0x28, 0xD8, 0x4D, 0xD9, 0x48, 0xD8},
{0x6D, 0xD9, 0x68, 0xD8, 0x8C, 0x9D, 0xAE, 0x29, 0xD9, 0x04, 0xAE, 0xD8, 0x51, 0xD9, 0x04, 0xAE},
{0xD8, 0x79, 0xD9, 0x04, 0xD8, 0x81, 0xF3, 0x9D, 0xAD, 0x00, 0x8D, 0xAE, 0x19, 0x81, 0xAD, 0xD9},
{0x01, 0xD8, 0xF2, 0xAE, 0xDA, 0x26, 0xD8, 0x8E, 0x91, 0x29, 0x83, 0xA7, 0xD9, 0xAD, 0xAD, 0xAD},
{0xAD, 0xF3, 0x2A, 0xD8, 0xD8, 0xF1, 0xB0, 0xAC, 0x89, 0x91, 0x3E, 0x5E, 0x76, 0xF3, 0xAC, 0x2E},
{0x2E, 0xF1, 0xB1, 0x8C, 0x5A, 0x9C, 0xAC, 0x2C, 0x28, 0x28, 0x28, 0x9C, 0xAC, 0x30, 0x18, 0xA8},
{0x98, 0x81, 0x28, 0x34, 0x3C, 0x97, 0x24, 0xA7, 0x28, 0x34, 0x3C, 0x9C, 0x24, 0xF2, 0xB0, 0x89},
{0xAC, 0x91, 0x2C, 0x4C, 0x6C, 0x8A, 0x9B, 0x2D, 0xD9, 0xD8, 0xD8, 0x51, 0xD9, 0xD8, 0xD8, 0x79}
},
{
{0xD9, 0xD8, 0xD8, 0xF1, 0x9E, 0x88, 0xA3, 0x31, 0xDA, 0xD8, 0xD8, 0x91, 0x2D, 0xD9, 0x28, 0xD8},
{0x4D, 0xD9, 0x48, 0xD8, 0x6D, 0xD9, 0x68, 0xD8, 0xB1, 0x83, 0x93, 0x35, 0x3D, 0x80, 0x25, 0xDA},
{0xD8, 0xD8, 0x85, 0x69, 0xDA, 0xD8, 0xD8, 0xB4, 0x93, 0x81, 0xA3, 0x28, 0x34, 0x3C, 0xF3, 0xAB},
{0x8B, 0xF8, 0xA3, 0x91, 0xB6, 0x09, 0xB4, 0xD9, 0xAB, 0xDE, 0xFA, 0xB0, 0x87, 0x9C, 0xB9, 0xA3},
{0xDD, 0xF1, 0xA3, 0xA3, 0xA3, 0xA3, 0x95, 0xF1, 0xA3, 0xA3, 0xA3, 0x9D, 0xF1, 0xA3, 0xA3, 0xA3},
{0xA3, 0xF2, 0xA3, 0xB4, 0x90, 0x80, 0xF2, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3},
{0xA3, 0xB2, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xB0, 0x87, 0xB5, 0x99, 0xF1, 0xA3, 0xA3, 0xA3},
{0x98, 0xF1, 0xA3, 0xA3, 0xA3, 0xA3, 0x97, 0xA3, 0xA3, 0xA3, 0xA3, 0xF3, 0x9B, 0xA3, 0xA3, 0xDC},
{0xB9, 0xA7, 0xF1, 0x26, 0x26, 0x26, 0xD8, 0xD8, 0xFF}
}
};
//DMP update transmissions (Bank, Start Address, Update Length, Update Data...)
static byte dmp_updates[29][9] =
{
{
0x03, 0x7B, 0x03, 0x4C, 0xCD, 0x6C
} //FCFG_1 inv_set_gyro_calibration
,
{
0x03, 0xAB, 0x03, 0x36, 0x56, 0x76
} //FCFG_3 inv_set_gyro_calibration
,
{
0x00, 0x68, 0x04, 0x02, 0xCB, 0x47, 0xA2
} //D_0_104 inv_set_gyro_calibration
,
{
0x02, 0x18, 0x04, 0x00, 0x05, 0x8B, 0xC1
} //D_0_24 inv_set_gyro_calibration
,
{
0x01, 0x0C, 0x04, 0x00, 0x00, 0x00, 0x00
} //D_1_152 inv_set_accel_calibration
,
{
0x03, 0x7F, 0x06, 0x0C, 0xC9, 0x2C, 0x97, 0x97, 0x97
} //FCFG_2 inv_set_accel_calibration
,
{
0x03, 0x89, 0x03, 0x26, 0x46, 0x66
} //FCFG_7 inv_set_accel_calibration
,
{
0x00, 0x6C, 0x02, 0x20, 0x00
} //D_0_108 inv_set_accel_calibration
,
{
0x02, 0x40, 0x04, 0x00, 0x00, 0x00, 0x00
} //CPASS_MTX_00 inv_set_compass_calibration
,
{
0x02, 0x44, 0x04, 0x00, 0x00, 0x00, 0x00
} //CPASS_MTX_01
,
{
0x02, 0x48, 0x04, 0x00, 0x00, 0x00, 0x00
} //CPASS_MTX_02
,
{
0x02, 0x4C, 0x04, 0x00, 0x00, 0x00, 0x00
} //CPASS_MTX_10
,
{
0x02, 0x50, 0x04, 0x00, 0x00, 0x00, 0x00
} //CPASS_MTX_11
,
{
0x02, 0x54, 0x04, 0x00, 0x00, 0x00, 0x00
} //CPASS_MTX_12
,
{
0x02, 0x58, 0x04, 0x00, 0x00, 0x00, 0x00
} //CPASS_MTX_20
,
{
0x02, 0x5C, 0x04, 0x00, 0x00, 0x00, 0x00
} //CPASS_MTX_21
,
{
0x02, 0xBC, 0x04, 0x00, 0x00, 0x00, 0x00
} //CPASS_MTX_22
,
{
0x01, 0xEC, 0x04, 0x00, 0x00, 0x40, 0x00
} //D_1_236 inv_apply_endian_accel
,
{
0x03, 0x7F, 0x06, 0x0C, 0xC9, 0x2C, 0x97, 0x97, 0x97
} //FCFG_2 inv_set_mpu_sensors
,
{
0x04, 0x02, 0x03, 0x0D, 0x35, 0x5D
} //CFG_MOTION_BIAS inv_turn_on_bias_from_no_motion
,
{
0x04, 0x09, 0x04, 0x87, 0x2D, 0x35, 0x3D
} //FCFG_5 inv_set_bias_update
,
{
0x00, 0xA3, 0x01, 0x00
} //D_0_163 inv_set_dead_zone
,
//SET INT_ENABLE at i=22
{
0x07, 0x86, 0x01, 0xFE
} //CFG_6 inv_set_fifo_interupt
,
{
0x07, 0x41, 0x05, 0xF1, 0x20, 0x28, 0x30, 0x38
} //CFG_8 inv_send_quaternion
,
{
0x07, 0x7E, 0x01, 0x30
} //CFG_16 inv_set_footer
,
{
0x07, 0x46, 0x01, 0x9A
} //CFG_GYRO_SOURCE inv_send_gyro
,
{
0x07, 0x47, 0x04, 0xF1, 0x28, 0x30, 0x38
} //CFG_9 inv_send_gyro -> inv_construct3_fifo
,
{
0x07, 0x6C, 0x04, 0xF1, 0x28, 0x30, 0x38
} //CFG_12 inv_send_accel -> inv_construct3_fifo
,
{
0x02, 0x16, 0x02, 0x00, 0x0A
} //D_0_22 inv_set_fifo_rate
};
void setup() {
Serial.begin(115200);
/*
while(!Serial.available()){
if(Serial.available()){
byte hereWeGo = Serial.read();
if( hereWeGo == 't'){
break;
}
}
}
*/
Wire.begin();
delay(1);
check_MPU();
Serial.println("MPU-6050 6-Axis");
regWrite(0x6B, 0xC0);
regWrite(0x6C, 0x00);
delay(10);
// regWrite(0x6B, 0x70);
regWrite(0x6B, 0x00);
regWrite(0x6D, 0x70);
regWrite(0x6E, 0x06);
temp = regRead(0x6F);
Serial.print("Bank 1, Reg 6 = ");
Serial.println(temp, HEX);
// temp = regRead(0x6B);
// Serial.println(temp, HEX);
regWrite(0x6D, 0x00);
temp = regRead(0x00);
Serial.println(temp, HEX);
temp = regRead(0x01);
Serial.println(temp, HEX);
temp = regRead(0x02);
Serial.println(temp, HEX);
temp = regRead(0x6A);
Serial.println(temp, HEX);
regWrite(0x37, 0x32);
temp = regRead(0x6B);
Serial.println(temp, HEX);
delay(5);
// regWrite(0x25, 0x68); //Set Slave 0 to self
//
// regWrite(0x6A, 0x02);
mem_init();
delay(20);
}
void dmp_init() {
for (int i = 0; i < 7; i++) {
bank_sel(i);
for (byte j = 0; j < 16; j++) {
byte start_addy = j * 0x10;
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(start_addy);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (int k = 0; k < 16; k++) {
unsigned char byteToSend = pgm_read_byte(&(dmpMem[i][j][k]));
Wire.write((byte) byteToSend);
}
Wire.endTransmission();
}
// Wire.beginTransmission(MPU_ADDR);
// Wire.send(MEM_R_W);
// Wire.endTransmission();
// Wire.requestFrom(MPU_ADDR, 16);
// byte echoback[16];
// for(int j = 0; j < 16; j++){
// echoback[j] = Wire.receive();
// }
// for(int j = 0; j < 16; j++){
// Serial.print(echoback[j], HEX);
// }
}
bank_sel(7);
for (byte j = 0; j < 8; j++) {
byte start_addy = j * 0x10;
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(start_addy);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (int k = 0; k < 16; k++) {
unsigned char byteToSend = pgm_read_byte(&(dmpMem[7][j][k]));
Wire.write((byte) byteToSend);
}
Wire.endTransmission();
}
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(0x80);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (int k = 0; k < 9; k++) {
unsigned char byteToSend = pgm_read_byte(&(dmpMem[7][8][k]));
Wire.write((byte) byteToSend);
}
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 9);
// Wire.endTransmission();
byte incoming[9];
for (int i = 0; i < 9; i++) {
incoming[i] = Wire.read();
}
// bank_sel(3);
// Wire.beginTransmission(MPU_ADDR);
// Wire.send(MEM_START_ADDR);
// Wire.send(0x10);
// Wire.endTransmission();
// Wire.beginTransmission(MPU_ADDR);
// Wire.send(MEM_R_W);
// Wire.endTransmission();
// Wire.beginTransmission(MPU_ADDR);
// Wire.requestFrom(MPU_ADDR,16);
// Wire.endTransmission();
// byte incoming[16];
// for(int i = 0; i < 16; i++){
// incoming[i] = Wire.receive();
// }
}
void mem_init() {
dmp_init();
for (byte i = 0; i < 22; i++) {
bank_sel(dmp_updates[i][0]);
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(dmp_updates[i][1]);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (byte j = 0; j < dmp_updates[i][2]; j++) {
Wire.write(dmp_updates[i][j + 3]);
}
Wire.endTransmission();
}
regWrite(0x38, 0x32);
for (byte i = 22; i < 29; i++) {
bank_sel(dmp_updates[i][0]);
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(dmp_updates[i][1]);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (byte j = 0; j < dmp_updates[i][2]; j++) {
Wire.write(dmp_updates[i][j + 3]);
}
Wire.endTransmission();
}
temp = regRead(0x6B);
Serial.println(temp, HEX);
temp = regRead(0x6C);
Serial.println(temp, HEX);
regWrite(0x38, 0x02);
regWrite(0x6B, 0x03);
// regWrite(0x6B, 0x70);
// regWrite(0x38, 0x38);
// regWrite(0x6B, 0x73);
regWrite(0x19, 0x04);
regWrite(0x1B, 0x18);
regWrite(0x1A, 0x0B);
regWrite(0x70, 0x03);
regWrite(0x71, 0x00);
regWrite(0x00, 0x00);
regWrite(0x01, 0x00);
regWrite(0x02, 0x00);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x13);
for (byte i = 0; i < 6; i++) {
Wire.write(0x00);
}
Wire.endTransmission();
// regWrite(0x24, 0x00);
bank_sel(0x01);
regWrite(0x6E, 0xB2);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0xFF); Wire.write(0xFF);
Wire.endTransmission();
bank_sel(0x01);
regWrite(0x6E, 0x90);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x09); Wire.write(0x23); Wire.write(0xA1); Wire.write(0x35);
Wire.endTransmission();
temp = regRead(0x6A);
regWrite(0x6A, 0x04);
//Insert FIFO count read?
fifoReady();
regWrite(0x6A, 0x00);
regWrite(0x6B, 0x03);
delay(2);
temp = regRead(0x6C);
// Serial.println(temp, HEX);
regWrite(0x6C, 0x00);
temp = regRead(0x1C);
// Serial.println(temp, HEX);
regWrite(0x1C, 0x00);
delay(2);
temp = regRead(0x6B);
// Serial.println(temp, HEX);
regWrite(0x1F, 0x02);
regWrite(0x21, 0x9C);
regWrite(0x20, 0x50);
regWrite(0x22, 0x00);
regWrite(0x6A, 0x04);
regWrite(0x6A, 0x00);
regWrite(0x6A, 0xC8);
bank_sel(0x01);
regWrite(0x6E, 0x6A);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x06); Wire.write(0x00);
Wire.endTransmission();
bank_sel(0x01);
regWrite(0x6E, 0x60);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
for (byte i = 0; i < 8; i++) {
Wire.write(0x00);
}
Wire.endTransmission();
// bank_sel(0x01);
// regWrite(0x6E, 0x60);
// Wire.beginTransmission(MPU_ADDR);
// Wire.send(0x6F);
// Wire.send(0x04); Wire.send(0x00); Wire.send(0x00); Wire.send(0x00);
// Wire.endTransmission();
bank_sel(0x00);
regWrite(0x6E, 0x60);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x40); Wire.write(0x00); Wire.write(0x00); Wire.write(0x00);
Wire.endTransmission();
//resetFifo();
}
void regWrite(byte addy, byte regUpdate) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(addy);
Wire.write(regUpdate);
Wire.endTransmission();
}
byte regRead(byte addy) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(addy);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 1);
// Wire.endTransmission();
while (!Wire.available()) {
}
byte incoming = Wire.read();
return incoming;
}
void getPacket() {
if (fifoCountL > 32) {
fifoCountL2 = fifoCountL - 32;
longPacket = true;
}
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x74);
Wire.endTransmission();
// Wire.requestFrom(MPU_ADDR, 42);
// for(byte i = 0; i < fifoCountL; i++){
if (longPacket) {
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 32);
for (byte i = 0; i < 32; i++) {
received_packet[i] = Wire.read();
}
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x74);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, (unsigned int)fifoCountL2);
for (byte i = 32; i < fifoCountL; i++) {
received_packet[i] = Wire.read();
}
longPacket = false;
}
else {
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, (unsigned int)fifoCountL);
for (byte i = 0; i < fifoCountL; i++) {
received_packet[i] = Wire.read();
}
}
}
byte read_interrupt() {
byte int_status = regRead(0x3A);
return int_status;
}
boolean fifoReady() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x72);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 2);
// Wire.endTransmission();
byte fifoCountH = Wire.read();
fifoCountL = Wire.read();
// Serial.println(fifoCountL, DEC);
if (fifoCountL == 42 || fifoCountL == 44) {
return 1;
}
// else if(fifoCountL != 0){
// resetFifo();
// }
// else if(fifoCountL == 42){
// getPacket();
// bank_sel(0);
// regWrite(0x6E, 0x60);
// Wire.beginTransmission(MPU_ADDR);
// Wire.send(0x40); Wire.send(0x00); Wire.send (0x00); Wire.send(0x00);
// Wire.endTransmission();
// resetFifo();
// }
// if(Wire.receive() == 0x2C){
// return 1;
// }
else return 0;
}
void resetFifo() {
byte ctrl = regRead(0x6A);
ctrl |= 0b00000100;
regWrite(0x6A, ctrl);
}
void loop() {
if (millis() >= lastRead + 10) {
lastRead = millis();
// byte int_status = read_interrupt();
// if(int_status & 0b00010000 != 0){
// resetFifo();
// Serial.println("FIFO Overflow");
// }
// if(int_status & 0b00000011 != 0){
// getPacket();
// sendPacket();
// }
if (fifoReady()) {
getPacket();
temp = regRead(0x3A);
if (firstPacket) {
delay(1);
bank_sel(0x00);
regWrite(0x6E, 0x60);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x04); Wire.write(0x00); Wire.write(0x00); Wire.write(0x00);
// Wire.send(0x00); Wire.send(0x80); Wire.send(0x00); Wire.send(0x00);
Wire.endTransmission();
bank_sel(1);
regWrite(0x6E, 0x62);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 2);
temp = Wire.read();
temp = Wire.read();
firstPacket = false;
fifoReady();
}
// resetFifo();
if (fifoCountL == 42) {
processQuat();
sendQuat();
}
// int receivedInts[10] = {(((int)received_packet[0] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[1]),
// (((int)received_packet[4] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[5]),
// (((int)received_packet[8] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[9]),
// (((int)received_packet[12] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[13]),
// (((int)received_packet[16] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[17]),
// (((int)received_packet[20] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[21]),
// (((int)received_packet[24] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[25]),
// (((int)received_packet[28] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[29]),
// (((int)received_packet[32] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[33]),
// (((int)received_packet[36] << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | received_packet[37])
// };
//
// for(int i = 0; i<10; i++){
// Serial.print(receivedInts[i], DEC); Serial.print(" ");
// }
// Serial.println();
// sendPacket();
}
}
}
void check_MPU() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x75);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 1);
byte aByte = Wire.read();
// Wire.endTransmission();
// while(Wire.available() == 0){
// }
// byte temp = Wire.receive();
// Serial.println(temp);
if (aByte == 0x68) {
Serial.println("Found MPU6050");
}
else {
Serial.println("Didn't find MPU6050");
}
}
void processQuat() {
processed_packet[0] = received_packet[0];
processed_packet[1] = received_packet[1];
processed_packet[2] = received_packet[4];
processed_packet[3] = received_packet[5];
processed_packet[4] = received_packet[8];
processed_packet[5] = received_packet[9];
processed_packet[6] = received_packet[12];
processed_packet[7] = received_packet[13];
}
void sendQuat() {
/*
byte packetType = 0x02;
byte button = 0x00;
Serial.print("$"); Serial.print(packetType);
for(byte i = 0; i < 8; i++){
Serial.print(processed_packet[i]);
}
Serial.print(button); Serial.print(packetCount);
Serial.print("\r\n");
if(packetCount < 0xFF){packetCount++;}
else{packetCount = 0x00;}
*/
// following conversion adapted from Invensense's TeaPot example
q[0] = (long) ((((unsigned long) processed_packet[0]) << <img src = "/smileys/bigeyes.gif" alt = "8)" title = "8)" class = "bbcode_smiley" height = "16" width = "16"> + ((unsigned long) processed_packet[1]));
q[1] = (long) ((((unsigned long) processed_packet[2]) << <img src = "/smileys/bigeyes.gif" alt = "8)" title = "8)" class = "bbcode_smiley" height = "16" width = "16"> + ((unsigned long) processed_packet[3]));
q[2] = (long) ((((unsigned long) processed_packet[4]) << <img src = "/smileys/bigeyes.gif" alt = "8)" title = "8)" class = "bbcode_smiley" height = "16" width = "16"> + ((unsigned long) processed_packet[5]));
q[3] = (long) ((((unsigned long) processed_packet[6]) << <img src = "/smileys/bigeyes.gif" alt = "8)" title = "8)" class = "bbcode_smiley" height = "16" width = "16"> + ((unsigned long) processed_packet[7]));
for (int i = 0; i < 4; i++ ) {
if ( q[i] > 32767 ) {
q[i] -= 65536;
}
q[i] = ((float) q[i]) / 16384.0f;
}
serialPrintFloatArr(q, 4);
Serial.print("\n");
}
void sendPacket() {
for (byte i = 0; i < fifoCountL - 1; i++) {
Serial.print(received_packet[i], HEX); Serial.print(" ");
}
Serial.println(received_packet[fifoCountL - 1], HEX); Serial.println();
}
void sendHeader() {
for (byte i = 0; i < 2; i++) {
Serial.print(received_packet[i], HEX); Serial.print(" ");
}
Serial.println();
}
void bank_sel(byte bank) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6D);
Wire.write(bank);
Wire.endTransmission();
}
void serialPrintFloatArr(float * arr, int length) {
for (int i = 0; i < length; i++) {
serialFloatPrint(arr[i]);
Serial.print(",");
}
}
void serialFloatPrint(float f) {
byte * b = (byte *) &f;
for (int i = 0; i < 4; i++) {
byte b1 = (b[i] >> 4) & 0x0f;
byte b2 = (b[i] & 0x0f);
char c1 = (b1 < 10) ? ('0' + b1) : 'A' + b1 - 10;
char c2 = (b2 < 10) ? ('0' + b2) : 'A' + b2 - 10;
Serial.print(c1);
Serial.print(c2);
}
}
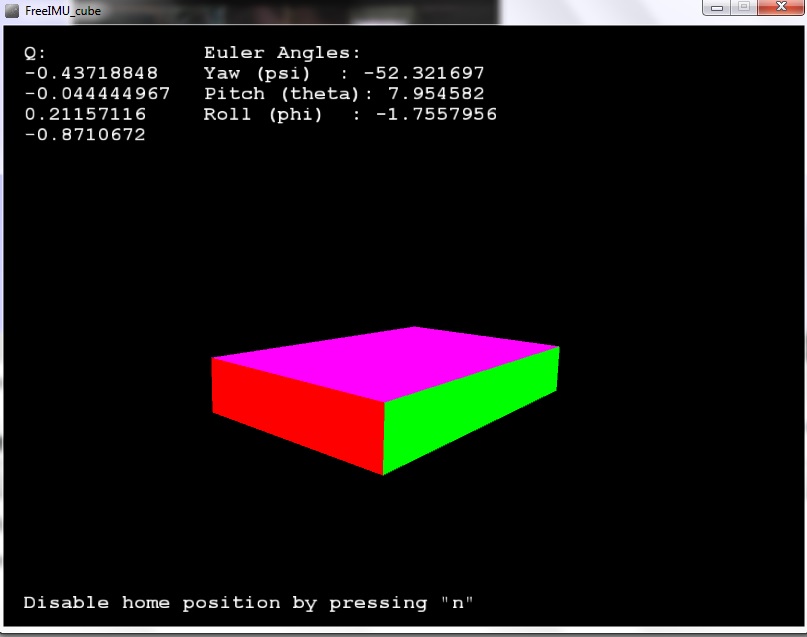
Qui invece la parte in Processing:
/**
Visualize a cube which will assumes the orientation described
in a quaternion coming from the serial port.
INSTRUCTIONS:
This program has to be run when you have the FreeIMU_quaternion
program running on your Arduino and the Arduino connected to your PC.
Remember to set the serialPort variable below to point to the name the
Arduino serial port has in your system. You can get the port using the
Arduino IDE from Tools->Serial Port: the selected entry is what you have
to use as serialPort variable.
Copyright (C) 2011 Fabio Varesano - http://www.varesano.net/
This program is free software: you can redistribute it and/or modify
it under the terms of the version 3 GNU General Public License as
published by the Free Software Foundation.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
*/
import processing.serial.*;
Serial myPort; // Create object from Serial class
//final String serialPort = "/dev/ttyUSB9"; // replace this with your serial port. On windows you will need something like "COM1".
final String serialPort = "COM3";
float [] q = new float [4];
float [] hq = null;
float [] Euler = new float [3]; // psi, theta, phi
int lf = 10; // 10 is '\n' in ASCII
byte[] inBuffer = new byte[22]; // this is the number of chars on each line from the Arduino (including /r/n)
PFont font;
final int VIEW_SIZE_X = 1024, VIEW_SIZE_Y = 768;
void setup()
{
size(VIEW_SIZE_X, VIEW_SIZE_Y, P3D);
myPort = new Serial(this, serialPort, 115200);
// The font must be located in the sketch's "data" directory to load successfully
font = loadFont("CourierNew36.vlw");
/*
float [] axis = new float[3];
axis[0] = 0.0;
axis[1] = 0.0;
axis[2] = 1.0;
float angle = PI/2.0;
hq = quatAxisAngle(axis, angle);
hq = new float[4];
hq[0] = 0.0;
hq[1] = 0.0;
hq[2] = 0.0;
hq[3] = 1.0;
*/
delay(100);
myPort.clear();
myPort.write("1");
}
float decodeFloat(String inString) {
byte [] inData = new byte[4];
if(inString.length() == <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> {
inData[0] = (byte) unhex(inString.substring(0, 2));
inData[1] = (byte) unhex(inString.substring(2, 4));
inData[2] = (byte) unhex(inString.substring(4, 6));
inData[3] = (byte) unhex(inString.substring(6, <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16">);
}
int intbits = (inData[3] << 24) | ((inData[2] & 0xff) << 16) | ((inData[1] & 0xff) << <img src="/smileys/bigeyes.gif" alt="8)" title="8)" class="bbcode_smiley" height="16" width="16"> | (inData[0] & 0xff);
return Float.intBitsToFloat(intbits);
}
void readQ() {
if(myPort.available() >= 18) {
String inputString = myPort.readStringUntil('\n');
//print(inputString);
if (inputString != null && inputString.length() > 0) {
String [] inputStringArr = split(inputString, ",");
if(inputStringArr.length >= 5) { // q1,q2,q3,q4,\r\n so we have 5 elements
q[0] = decodeFloat(inputStringArr[0]);
q[1] = decodeFloat(inputStringArr[1]);
q[2] = decodeFloat(inputStringArr[2]);
q[3] = decodeFloat(inputStringArr[3]);
}
}
}
}
void buildBoxShape() {
//box(60, 10, 40);
noStroke();
beginShape(QUADS);
//Z+ (to the drawing area)
fill(#00ff00);
vertex(-30, -5, 20);
vertex(30, -5, 20);
vertex(30, 5, 20);
vertex(-30, 5, 20);
//Z-
fill(#0000ff);
vertex(-30, -5, -20);
vertex(30, -5, -20);
vertex(30, 5, -20);
vertex(-30, 5, -20);
//X-
fill(#ff0000);
vertex(-30, -5, -20);
vertex(-30, -5, 20);
vertex(-30, 5, 20);
vertex(-30, 5, -20);
//X+
fill(#ffff00);
vertex(30, -5, -20);
vertex(30, -5, 20);
vertex(30, 5, 20);
vertex(30, 5, -20);
//Y-
fill(#ff00ff);
vertex(-30, -5, -20);
vertex(30, -5, -20);
vertex(30, -5, 20);
vertex(-30, -5, 20);
//Y+
fill(#00ffff);
vertex(-30, 5, -20);
vertex(30, 5, -20);
vertex(30, 5, 20);
vertex(-30, 5, 20);
endShape();
}
void drawCube() {
pushMatrix();
translate(VIEW_SIZE_X/2, VIEW_SIZE_Y/2 + 50, 0);
scale(5,5,5);
// a demonstration of the following is at
// http://www.varesano.net/blog/fabio/ahrs-sensor-fusion-orientation-filter-3d-graphical-rotating-cube
rotateZ(-Euler[2]);
rotateX(-Euler[1]);
rotateY(-Euler[0]);
buildBoxShape();
popMatrix();
}
void draw() {
background(#000000);
fill(#ffffff);
readQ();
if(hq != null) { // use home quaternion
quaternionToEuler(quatProd(hq, q), Euler);
text("Disable home position by pressing \"n\"", 20, VIEW_SIZE_Y - 30);
}
else {
quaternionToEuler(q, Euler);
text("Point FreeIMU's X axis to your monitor then press \"h\"", 20, VIEW_SIZE_Y - 30);
}
textFont(font, 20);
textAlign(LEFT, TOP);
text("Q:\n" + q[0] + "\n" + q[1] + "\n" + q[2] + "\n" + q[3], 20, 20);
text("Euler Angles:\nYaw (psi) : " + degrees(Euler[0]) + "\nPitch (theta): " + degrees(Euler[1]) + "\nRoll (phi) : " + degrees(Euler[2]), 200, 20);
drawCube();
}
void keyPressed() {
if(key == 'h') {
println("pressed h");
// set hq the home quaternion as the quatnion conjugate coming from the sensor fusion
hq = quatConjugate(q);
}
else if(key == 'n') {
println("pressed n");
hq = null;
}
}
// See Sebastian O.H. Madwick report
// "An efficient orientation filter for inertial and intertial/magnetic sensor arrays" Chapter 2 Quaternion representation
void quaternionToEuler(float [] q, float [] euler) {
euler[0] = atan2(2 * q[1] * q[2] - 2 * q[0] * q[3], 2 * q[0]*q[0] + 2 * q[1] * q[1] - 1); // psi
euler[1] = -asin(2 * q[1] * q[3] + 2 * q[0] * q[2]); // theta
euler[2] = atan2(2 * q[2] * q[3] - 2 * q[0] * q[1], 2 * q[0] * q[0] + 2 * q[3] * q[3] - 1); // phi
}
float [] quatProd(float [] a, float [] b) {
float [] q = new float[4];
q[0] = a[0] * b[0] - a[1] * b[1] - a[2] * b[2] - a[3] * b[3];
q[1] = a[0] * b[1] + a[1] * b[0] + a[2] * b[3] - a[3] * b[2];
q[2] = a[0] * b[2] - a[1] * b[3] + a[2] * b[0] + a[3] * b[1];
q[3] = a[0] * b[3] + a[1] * b[2] - a[2] * b[1] + a[3] * b[0];
return q;
}
// returns a quaternion from an axis angle representation
float [] quatAxisAngle(float [] axis, float angle) {
float [] q = new float[4];
float halfAngle = angle / 2.0;
float sinHalfAngle = sin(halfAngle);
q[0] = cos(halfAngle);
q[1] = -axis[0] * sinHalfAngle;
q[2] = -axis[1] * sinHalfAngle;
q[3] = -axis[2] * sinHalfAngle;
return q;
}
// return the quaternion conjugate of quat
float [] quatConjugate(float [] quat) {
float [] conj = new float[4];
conj[0] = quat[0];
conj[1] = -quat[1];
conj[2] = -quat[2];
conj[3] = -quat[3];
return conj;
}
Un ringraziamento a Fabio Varesano per il lavoro svolto – link

salve, io sto provando a comandare tre servo con arduino e mpu6050. purtroppo ho un problema con l’asse z. puo darmi una mano?
Ciao Dario,
descrivimi il tuo problema e vediamo cosa si può fare..